Robot State View
English >>
基本情報
ホーム(お知らせ)
OpenHRP3とは
ダウンロード
ドキュメント
インストール
(Ver.3.1.4)
インストール
(Ver.3.0.8)
ユーザーズマニュアル
(Ver.3.1.4)
ユーザーズマニュアル
(Ver.3.0.8)
プログラミングマニュアル
力学計算アルゴリズム
リファレンスマニュアル
補足情報
サンプル動画
Tips
Troubleshooting
(Ver.3.1)
Troubleshooting
(Ver.3.0)
既知の不具合
発表論文
サポート
質問用掲示板
講習会情報
リンク
OpenRTM-aist
Choreonoid
hrpsys-base
HRP-4Cモデル
RTM-ROS 相互運用プロジェクト
HP ログ
OpenHRP3 他バージョン
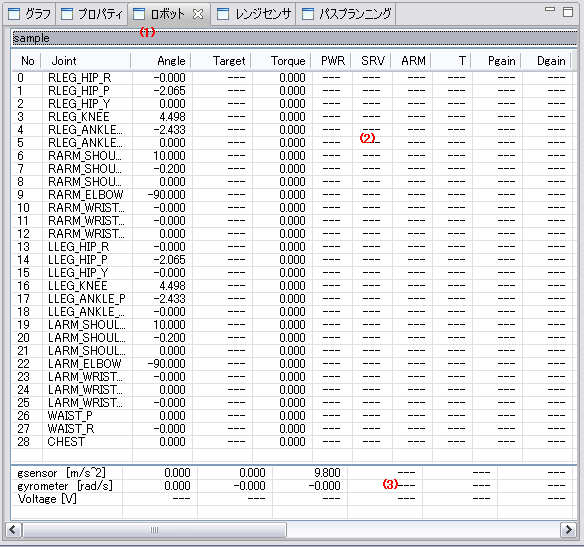
Robot State View概要
Robot State Viewを構成する各種要素について説明します。
ロボット名
Itemに複数のロボットがある場合、リストボックスから選択できます。
ジョイント情報一覧
ロボットのジョイント情報の一覧です。
センサ情報一覧
センサ情報の一覧です。
図は、サンプルプロジェクト"SamplePD.xml"をロードした時の例を示しています。