OpenHRP View概要
OpenHRP Viewを構成する各種要素について説明します。
OpenHRP Viewはsimulation, controller, collisionの3つのタブから構成されます.
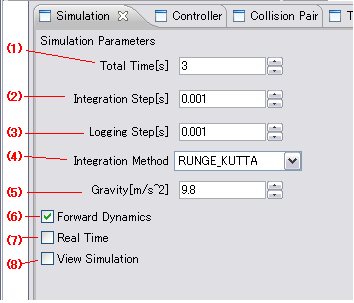
simulationタブ
simulationタブ
- Total Time[s]
シミュレーションを行う総時間を秒単位で指定します。
- Integration Step[s]
積分タイムステップを秒単位で指定します。
- Logging Step[s]
ロギングタイムステップを秒単位で指定します。
- Integration Method
積分方法を指定します。
- Gravity[m/s^2]
重力加速度を指定します。
- Forward Dynamice
順動力学計算の有無を指定します。
- View Simulation
視野画像シミュレーションを行うか否かを指定します。このチェックボックスにチェックを入れると,シミュレーション対象のロボットや環境オブジェクトにVisionSensorノードが取り付けられていた場合に視野画像生成が行われ,シミュレーション開始と同時に視野画像を表示するウィンドウが表示されます.逆にこのチェックボックスにチェックが入っていない場合,VisionSensorノードが取り付けられたモデルのシミュレーションを行っても視野画像の生成は行われません.
controllerタブ

controllerタブ
- Robot Name
ロボット名の一覧です。
- Controller
コントローラーの一覧です。CORBA IDで表示されます。
- Control Time[s]
制御周期の一覧です。
- Working Dir.
ワークディレクトリの一覧です。
- Setup Command
起動コマンドの一覧です。
- Detach ボタン
クリックすることで選択した行を削除します。
- Edit ボタン
クリックすることで選択した行をEditできる様にします。
- Controller
コントローラーをCORBA IDリストボックスから選択します。
- Control Time[s]
制御周期を秒単位で指定します。
- Working Dir.
ワークディレクトリを指定します。$(環境変数名)の形で環境変数が使えます。
- Setup Command
起動コマンドを指定します。$(環境変数名)の形で環境変数が使えます。
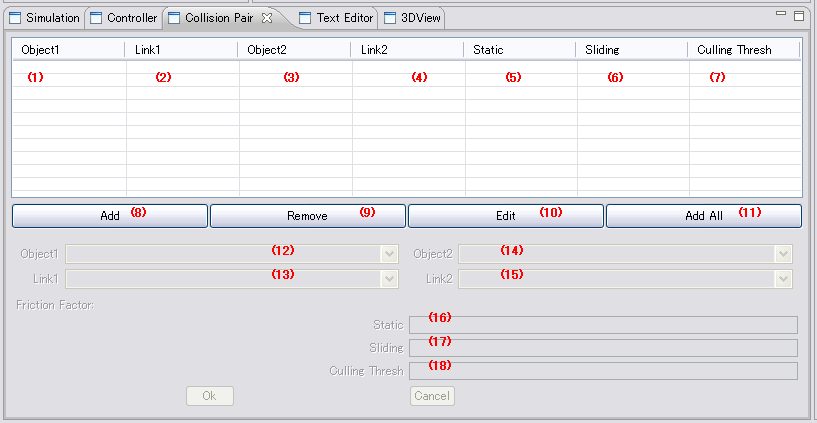
collisionタブ
collisionタブ
- Object1
collisionペア(その1)のObjectの一覧です。
- Link1
collisionペア(その1)のLinkの一覧です。
- Object2
collisionペア(その2)のObjectの一覧です。
- Link2
collisionペア(その2)のLinkの一覧です。
- SDModel
Spring Damper Modelが有効かどうかの一覧です。
- Add ボタン
collisionペアを追加します。
- Remove ボタン
選択されたcollisionペアを削除します。
- Edit ボタン
選択されたcollisionペアを編集します。
- Add Allボタン
組み合わせられるcollisionペアを全て追加します。
- Object1
collisionペア(その1)のObjectをリストボックスから選択します。
- Link1
collisionペア(その1)のLinkをリストボックスから選択します。選択しない場合はすべてのLinkが対象となります。
- Object2
collisionペア(その2)のObjectをリストボックスから選択します。
- Link1
collisionペア(その2)のLinkをリストボックスから選択します。選択しない場合はすべてのLinkが対象となります。
- Spring Damper Model
スプリングダンパーモデルを指定するときにチェックします。
- Spring Constant
スプリングダンパーモデルが指定された場合、バネ定数を入力します。
- Damper Constant
スプリングダンパーモデルが指定された場合、ダンパー定数を入力します。
- Static
静摩擦係数を入力します。スプリングダンパーモデルが指定されない場合に有効です。
- Sliding
動摩擦係数を入力します。スプリングダンパーモデルが指定されない場合に有効です。
