概要
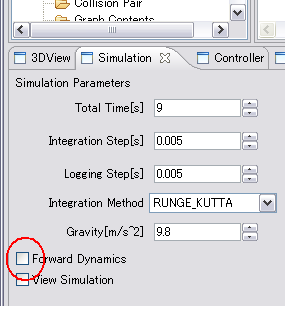
ここでは、動力学計算を行わないシミュレーションの方法を紹介します。sample/project/SampleRH2.xmlがサンプルになります。 シミュレーションの設定Simulationタグをクリックして、Forward Dynamicsのチェックをはずします。
この時、関節の制御モードの指定は、意味がなくなります。 コントローラの作成コントローラのソースファイルはsample/controller/SampleRH2以下にあります。
コントローラはルート間接の位置と姿勢を、あらかじめ適当に作成しておいたファイルから読み込んで出力する単純なものです。 |