プロジェクト
プロジェクトはGrxUIを使用して作成します。まずGrxUIを起動してください。
準備
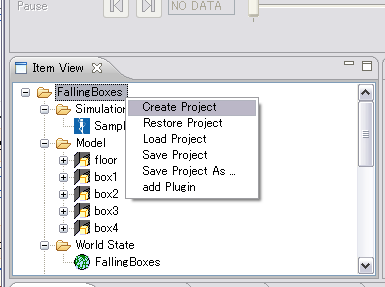
既に他のプロジェクトが読み込まれている状態でしたら、GrxUIメニューから"New Project"を選択するか、Item Viewのプロジェクトアイテムを右クリックから"create Project"を選択して、新規のプロジェクトを作成します。
モデル
ロボットの歩行シミュレーションを扱うため、ロボットと床をロードします。
Item ViewリストにあるModelを右クリックし、Loadを選んでください。
OpenHRP3/sample/model フォルダーにあるfloor.wrlとsample.wrlをロードします。
floorを右クリックし、change into environment modelを選んで、環境モデルとします。
次にロボットの初期姿勢をあたえます。モデルsampleのプロパティをProperty Viewを使って図1のように設定します。
表1では入力値を明示します。
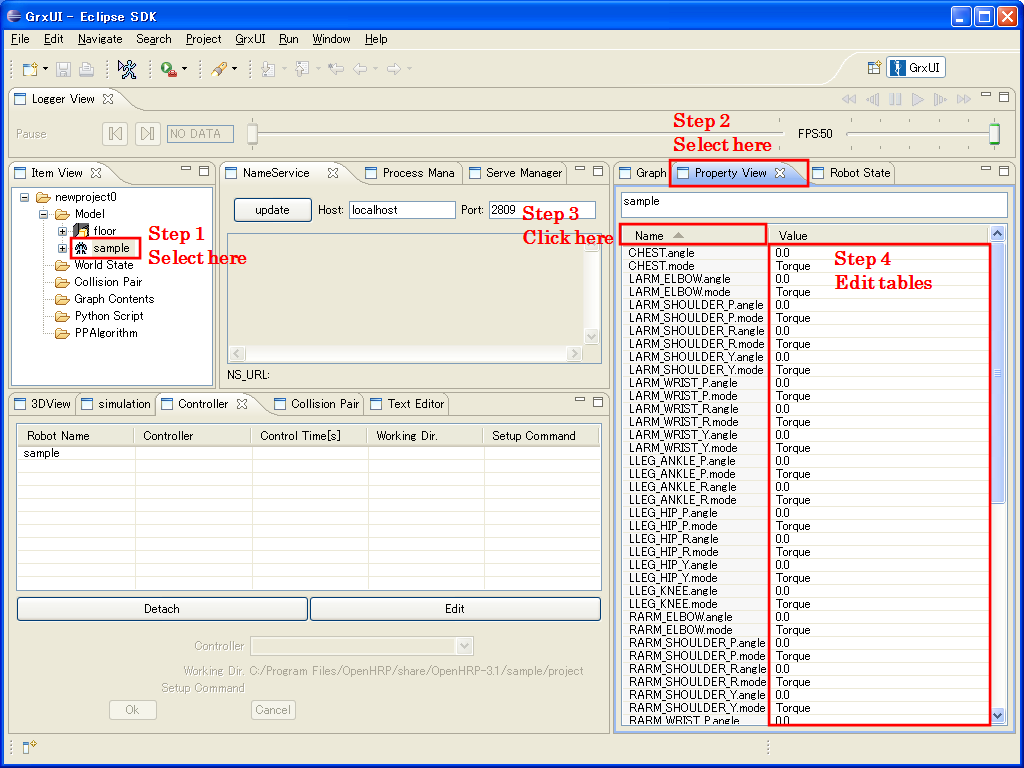
図1: Property 編集手順
表1: Sample robot property
| CHEST.angle | 0.0 |
| LARM_ELBOW.angle | -1.5708 |
| LARM_SHOULDER_P.angle | 0.174533 |
| LARM_SHOULDER_R.angle | -0.003490 |
| LARM_SHOULDER_Y.angle | 0.0 |
| LARM_WRIST_P.angle | 0.0 |
| LARM_WRIST_R.angle | 0.0 |
| LARM_WRIST_Y.angle | 0.0 |
| LLEG_ANKLE_P.angle | -0.0424675 |
| LLEG_ANKLE_R.angle | 0.0 |
| LLEG_HIP_P.angle | -0.0360373 |
| LLEG_HIP_R.angle | 0.0 |
| LLEG_HIP_Y.angle | 0.0 |
| LLEG_KNEE.angle | 0.0785047 |
| RARM_ELBOW.angle | -1.5708 |
| RARM_SHOULDER_P.angle | 0.174533 |
| RARM_SHOULDER_R.angle | -0.003490 |
| RARM_SHOULDER_Y.angle | 0.0 |
| RARM_WRIST_P.angle | 0.0 |
| RARM_WRIST_R.angle | 0.0 |
| RARM_WRIST_Y.angle | 0.0 |
| RLEG_ANKLE_P.angle | -0.0424675 |
| RLEG_ANKLE_R.angle | 0.0 |
| RLEG_HIP_P.angle | -0.0360373 |
| RLEG_HIP_R.angle | 0.0 |
| RLEG_HIP_Y.angle | 0.0 |
| RLEG_KNEE.angle | 0.0785047 |
| WAIST.rotation | 0.0 1.0 0.0 0.0 |
| WAIST.translation | 0.0 0.0 0.713 |
| WAIST_P.angle | 0.0 |
| WAIST_R.angle | 0.0 |
WorldState
ここでは、WorldStateを作成しパラメータを与えます。
Item ViewリストにあるWorldStateを右クリックし、createを選んでください。
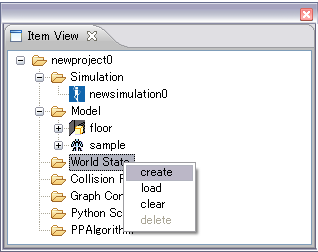
図2: WorldState
Simulation Viewで各項目を以下のとおりに設定してください。
表2: Simulation Parameters
| Total Times[s] | 13.4 |
| Integration Step[s] | 0.0020 |
| Logging Step[s] | 0.0020 |
| Integration Method | RUNGE_KUTTA |
| Gravity[ms-2] | 9.8 |
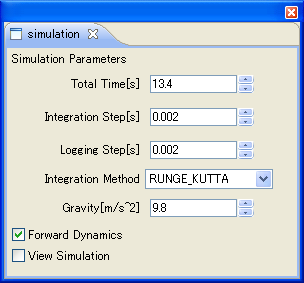
図3: Simulation Parameters
Collision Pair
Collision Pair Viewでfloor-sample間の干渉チェックが行われるように設定してください。
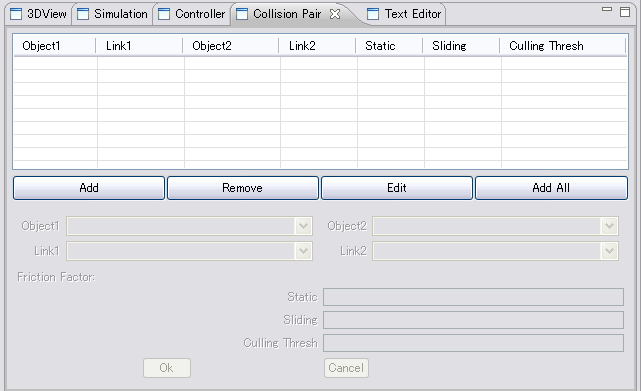
図4: Collision Pair View
Addボタンをクリック、Object1はsample、Object21はfloorを選択してOKボタンをクリックしてください。
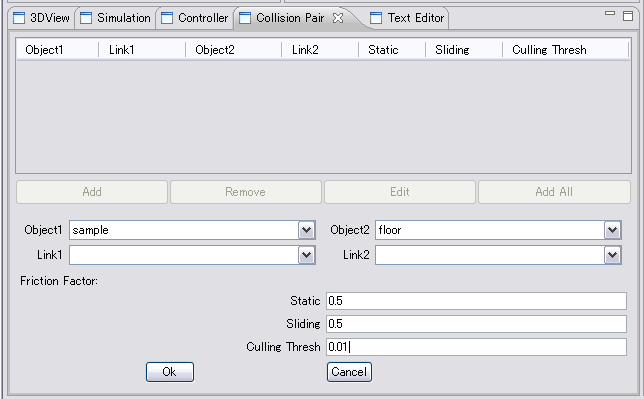
図5: Collision Pair追加
コントローラ
ここではコントローラの設定を行います。
※ コントローラの作成方法は、コントローラの作成で説明します。ここでは、既に作成されているサンプルのコントローラを指定する方法を説明しています。
Controller ViewでロボットのリストからSampleを選択し、Editボタンを押します。
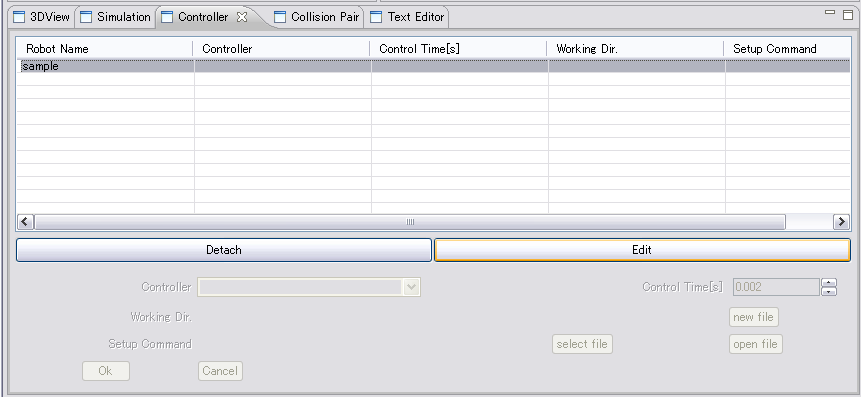
図6 : Controller View
表3に示すようにコントローラ・パラメータを設定してください。
Controller の 選択項目として SamplePDController が現れない場合は手動で記入してください。
Control Timeはコントローラの実行間隔です。シミュレーションの積分間隔以上の値を設定してください。
Working DirとSetup Commandは図のようにファイル選択ダイアログを利用して選択するか、表3のように環境変数を使って指定してください。
表3 : Controller Parameters
| Controller | SamplePDController |
| Control Time[s] | 0.002 |
| Working Dir. | $(PROJECT_DIR)/../controller/SamplePD |
| Setup Command | SamplePD$(BIN_SFX) |
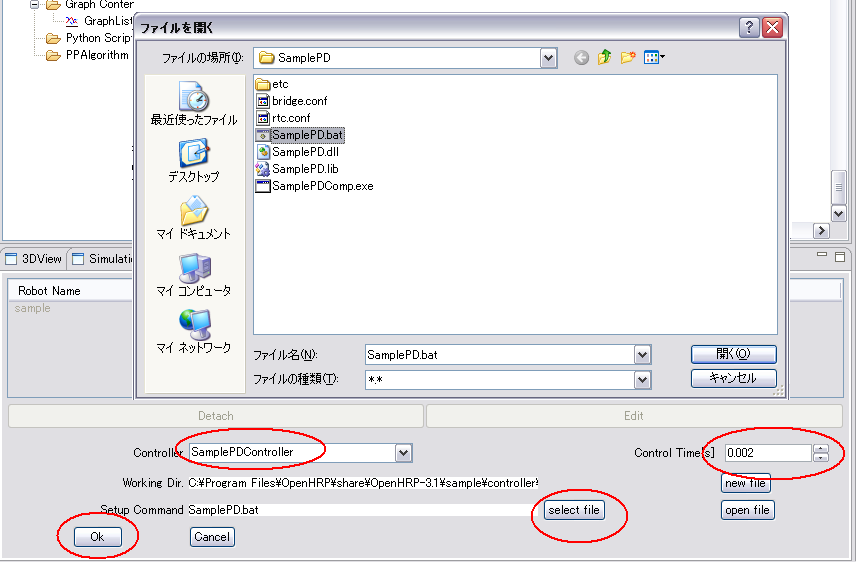
図7 : Controller View
シミュレーション
シミュレーションを実行してください。"start simulation"ボタンでシミュレーションを開始しします。
図8: シミュレーション開始
プロジェクトファイルの保存
生成したプロジェクトを保存するには、GrxUIメニューから"Save Project"を選択してプロジェクトファイルを保存します。
