物理シミュレーションの実行¶
このチュートリアルでは、Choreonoidを使って物理シミュレーションを行う方法を説明します。
設定¶
メインメニューでの操作:
Worldアイテムを作成( “File” -> “New...” -> “World”を選択)。
AISTSimulatorアイテムを作成(”File” -> “New...” -> “AISTSimulator”を選択)。
Modelアイテムのロード(”File” -> “Open...” -> “OpenHRP Model File”を選択)。
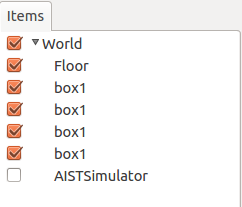
Itemパネルでの操作:
アイテムをドラッグアンドドロップして以下のように並べます(modelアイテムとsimulatorアイテムはworldアイテムの下になければなりません)。