Physics simulation¶
This tutorial explains how to configure and apply physics simulation in choreonoid.
Configuration¶
From main menu:
- Create World item (select “File” -> “New...” -> “World”).
- Create AISTSimulator item (select “File” -> “New...” -> “AISTSimulator”).
- Load model item (select “File” -> “Open...” -> “OpenHRP Model File”).
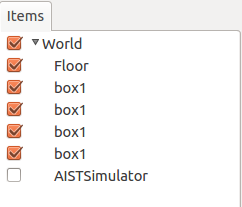
In item panel:
Drag and drop the items to following order (model and simulator item must belong to the world item).
Set initial pose¶
Change the robot to initial pose (see Controlling robot with forward and inverse kinematics).
Click “store initial state” button.