
OverviewMove operation design tool plans the migratory pathway of the robot on a two-dimensional plane. It is included in OpenHRP from version 3.1.0.beta3. Move operation design tool consists of move operation design components which can be used also as the RT component, and the PathPlanning view which is one of the views of GrxUI. First of all, please check a rough procedure by an animation.
ConfigurationEclipse starting and display of a perspectivePlease start Eclipse and display a GrxUI perspective. When the GrxUI perspective is not displayed, click "Open perspective" -> "others" and choose GrxUI from a list.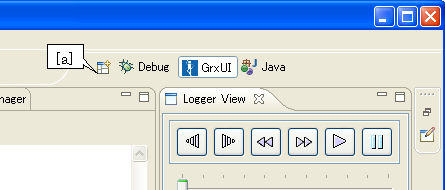
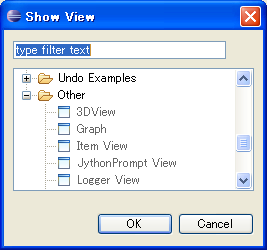
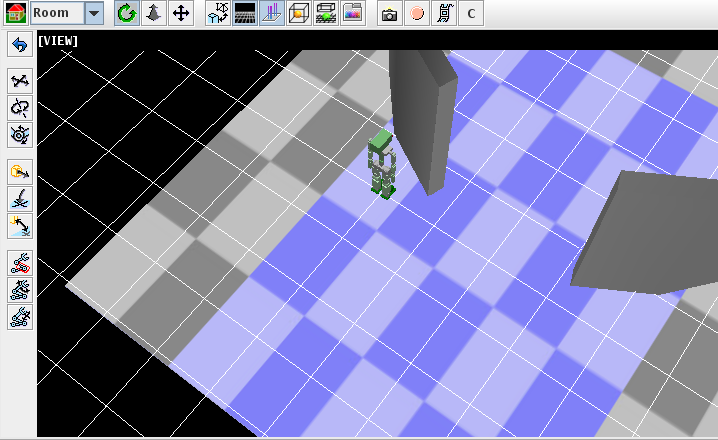
The check of a required viewIf 3DView、Path Planning、Logger View、Property View、Item Vieware not displayed, Please click "Window"->"Display of view"->"others" from a menu bar to add them.
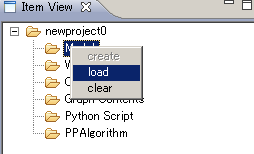
Construction of a sceneYou load the model file of the robot and the obstacle, and build the scene for designing move operation.Loading of the existing projectPlease choose "GrxUI"->"load of project" from a menu bar. Please choose the project file to load.building of a new scenePlease right-click "Model" by Item View, choose "load". Please choose the file to load in a file selection dialog.
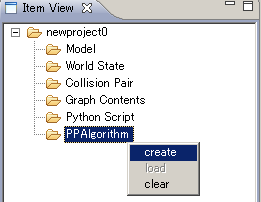
Creation of a World State itemPlease right-click "World State" by Item View, choose "create".Creation of a collision pairPlease create the collision pair between a robot and an obstacle by Collision view.Creation of the parameter set for algorithmsPlease right-click "PPArgolithm" by Item View, choose "create". If you save a project, the parameter for algorithms is also saved simultaneously.
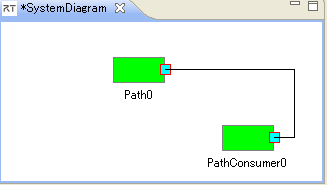
Connection with a course plan enginePlease start openhrp-path-planner. Please prepare rtc.conf which described the position of the suitable name server in the directory. Next, please change a perspective into RT System Editor, newly open a stem editor, and drag a Path component and a PathConsumer component. Please connect a service port and a consumer port.
Calculation of a course planYou set a parameter with a PathPlanner view (the following figure).
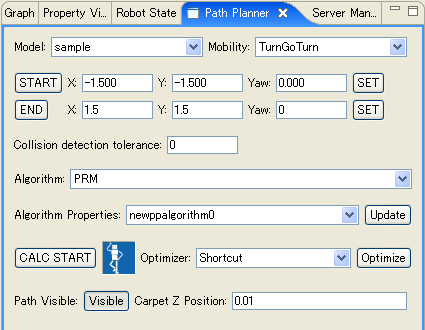
By default, a random number is the range of (-2,-2) ~ (2,2), interpolation distance is 0.1、all weight of distance is 1. A PRM algorithm has the following properties.
By default, Neighborhood distance is 1.0, The number of points is 100. A RRT algorithm has the following properties.
By default, Neighborhood distance is 1.0, The maximum of the number of times of trial is 10000. Path planPlease push a calculation start button to start a path plan. A calculation indicator moves and a dialog is displayed. Please push the button of a dialog, for interrupting calculation on the way.The display of a course and a road mapAfter calculation is completed, selection of a course display button is attained and it can change a display and un-displaying of a course.
    Optimization of a pathIn order to optimize the planned path, please choose a path optimization algorithm and push the Optimize button. A display is updated by the optimized path when the path is visible. |