GrxUIの起動OpenHRP3のGUIであるGrxUIを起動スクリプトを用いて起動します。 起動スクリプトは、OpenHRP3を展開したディレクトリの、
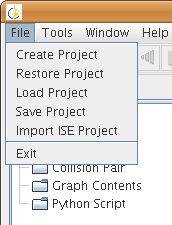
Windowsの場合、上記のファイルをエクスプローラよりダブルクリックすることにより 起動するのが簡単です。本サイトから提供する OpenHRP3 バイナリパッケージ(msi) を 用いた場合、「スタート」→「すべてのプログラム」→「OpenHRP3」のメニュの下に GrxUI.bat 起動スクリプトへのショートカットが貼り付けられますので、それを利用して 起動することもできます。 Linuxの場合も、Windowsと同様にファイルブラウザからダブルクリックしてもよいですし、 コマンドラインから、 cd OpenHRP3のディレクトリ cd bin/unix ./GrxUI.shとしてもよいでしょう。 シミュレーションの実行プロジェクトを開く"File" - "Load Project"より、プロジェクトを開きます。
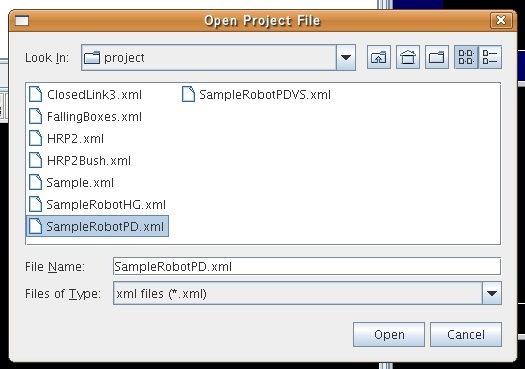
以下のようなファイル選択ダイアログが表れますので、 適当なファイルを読み込んでみましょう。 (なお、標準で入っているサンプルプロジェクトはバージョンによって 以下とは異なる可能性があります。)
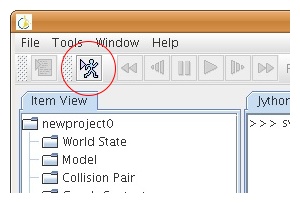
シミュレーションプロジェクトを読み込んだら、 "start simulation"ボタンでシミュレーションを開始します。
GrxUIウィンドウの左下でシミュレーション対象のモデルが動作するアニメーションが 表示されたでしょうか? 最新版では、 以下のようなシミュレーションサンプルがありますので、試してみてください. 以下に示す動作が実現していれば、インストールはうまくいったと考えてよいでしょう。
|