Choreonoidモデル編集機能チュートリアル¶
新規にモデルを作成する¶
準備¶
以下のデータを準備してください。
各リンクの形状を定義するVRML97ファイル。
各リンクの質量特性(質量、重心位置、重心周りの慣性モーメント)
機構パラメータ(関節の相対位置・回転関係)
関節の属性値(可動範囲、速度上限値など)
作成¶
まず最初に、EditableBodyItemを「ファイル > 新規 > EditableBodyItem」から作成します。
JointItemを「ファイル > 新規 > JointItem」から生成します。最初のJointItemはEditableBodyItemの子供として、その他のJointItemは他のJointItemの子どもとして作成します。
LinkItemを「ファイル > 新規 > LinkItem」からJointItemの子供として作成します。
PrimitiveShapeItemまたはMeshShapeItemをLinkItemの子供として作成し、形状を設定します。
SensorItemを「ファイル > 新規 > SensorItem」からJointItemの子供として作成します。
上記の手順を必要なすべてのアイテムが生成されるまで繰り返します。その後で(またはアイテム作成のたびに)、各アイテムのプロパティを用意したデータを用いて設定します。
警告
アイテムを可視化するには、ItemViewで可視化したいアイテムにチェックを入れる必要があります。
保存¶
作成したモデルを「ファイル > 名前を付けて選択アイテムを保存」を使って保存します。
2つのロボットを接続する¶
この例では、アーム型のロボット(PA10)と車輪型のロボットを接続して、移動型のアームロボットを作成します。
まず、アーム型のロボットを読み込みます。
メニューから「File > Open ... > OpenHRP Model File for Editing」を選択してください。
警告
ここではメニューから「OpenHRPモデルファイル」ではなく「OpenHRP Model File for Editing」を選択するように注意してください。
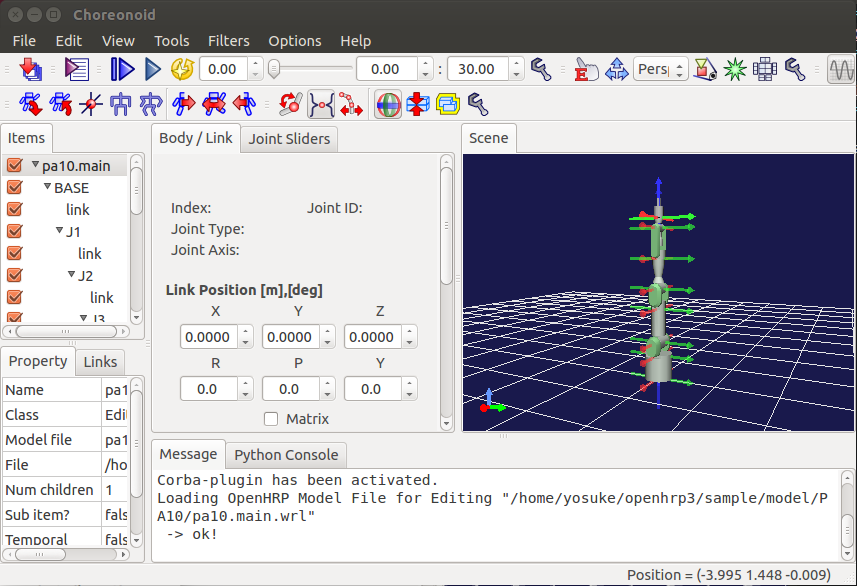
ダイアログが開くのでOpenHRPのサンプルフォルダから「pa10.main.wrl」ファイルを選択してください。
アームロボットがロードできました。各アイテムの横のチェックボックスをオンにすることで、ロボットの外観がシーンパネル上で確認できます。
車輪型のロボットも読み込みます。
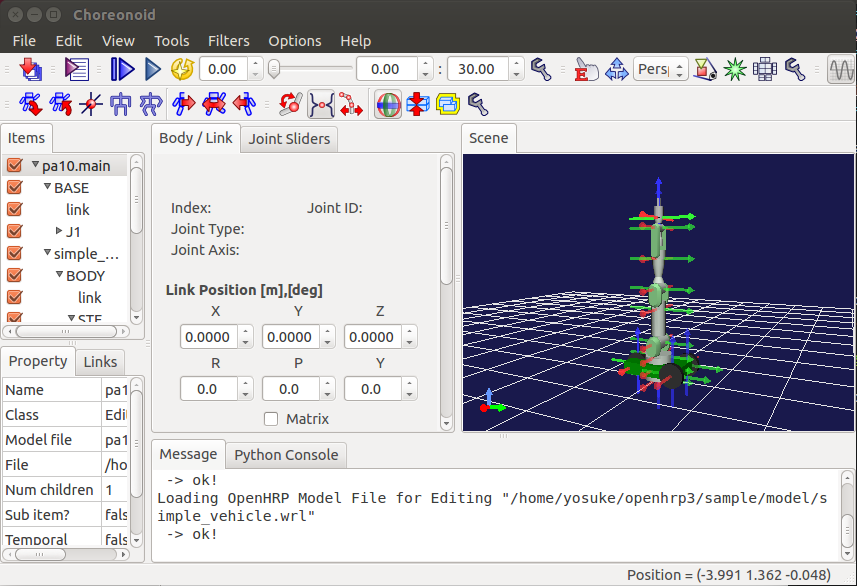
メニューから「File > Open ... > OpenHRP Model File for Editing」を選択してください。
ダイアログが開くのでOpenHRPのサンプルフォルダから「simple_vehicle.wrl」ファイルを選択してください。
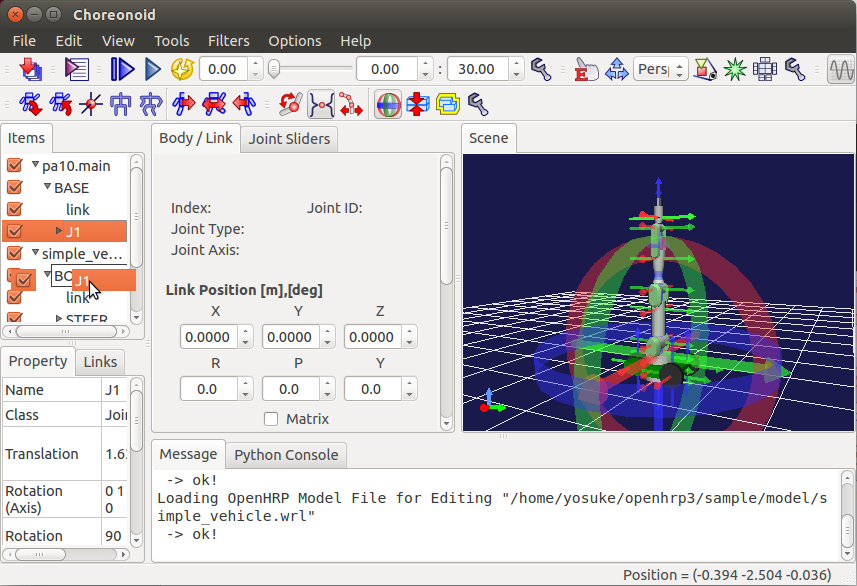
アーム型ロボットを台車に接続するために、PA10モデルの「J1」アイテムをクリックしてドラッグし、simple_vehicleモデルの「BODY」アイテムの上でドロップしてください。
アーム型ロボットに関するアイテムを右クリックすることで消去します。
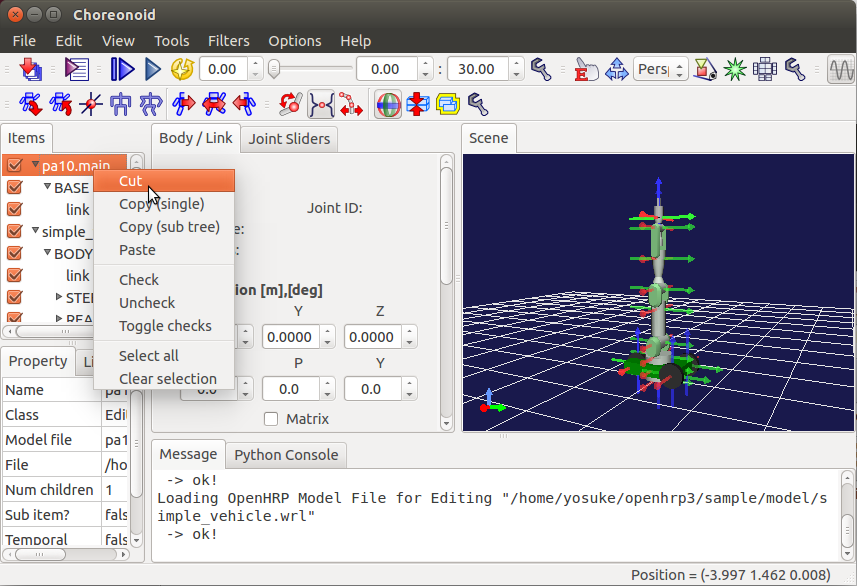
モデルアイテムをクリックしてメニューから「File > Save Selected Item As」を選択してVRML形式でモデルをセーブしましょう。
保存ダイアログではフォーマットとしてURDFとSDFも選ぶことができます。